ภาพรวมการทำงานของระบบ
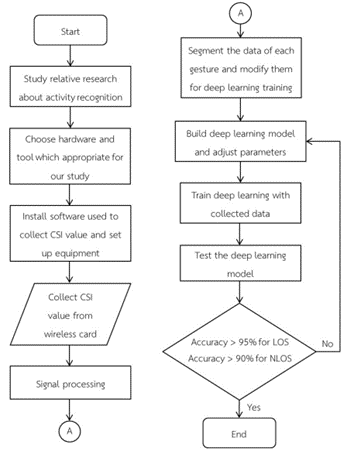
แผนผังงาน (Flowchart) ด้านล่างแสดงขั้นตอนวิธีการดำเนินงานสร้างระบบการตรวจจับการหกล้มของผู้สุงอายุ หรือผู้พิการ ได้อย่างรวดเร็วในระยะเริ่มต้น (Fall Early Detection System for Monitoring an Elderly Person or a Disabled Person) โดยใช้สัญญาณคลื่นวิทยุ Wi-Fi และการเรียนรู้เชิงลึก (Deep Learning) รูปที่ 1 แสดงขั้นตอนต่างๆ ของระบบ
อุปกรณ์ที่ใช้ในการพัฒนาระบบ
ในระบบการตรวจจับการหกล้มของผู้สูงอายุหรือผู้พิการ ผ่านสัญญาณคลื่นวิทยุ Wi-Fi นี้เราสามารถรวบรวมค่า ข้อมูลสถานะช่องสัญญาณของคลื่นสัญญาณ (CSI) ที่ผ่านตัวผู้ใช้ (ผู้สูงอายุหรือผู้พิการ) สำหรับ แต่ละกิจกรรมหรือท่าทาง (ล้มหรือไม่ล้ม) โดยฮาร์ดแวร์ ที่ใช้ เราได้ตัดสินสินใจที่จะเลือกใช้ Raspberry Pi 4 เป็น Monitor Mode แทนการ์ดไร้สายพิเศษ Intel® Ultimate N Wi-Fi Link 5300 series (IEEE 802.11a/b/g/Draft-N1 wireless network adapters) เป็นตัวรับที่ติดตั้งในเครื่องคอมพิวเตอร์แล็ปท็อป (Laptop) Lenovo Thinkpad X200 (ตามที่ได้เสนอไว้ในแบบข้อเสนอโครงการ) เนื่องจากจะทำให้การเก็บข้อมูลและประมวลผลของเรา เป็นไปแบบเรียลไทม์ (Real-Time) ได้ อีกทั้งยังทำให้ตัวเลือก ในการใช้เครื่องคอมพิวเตอร์ตั้งโต๊ะ Personal Computer (PC) หรือเครื่องคอมพิวเตอร์แล็ปท็อป มีมากขึ้น เนื่องจากไม่มีข้อจำกัดที่ต้องการรองรับการ์ดไร้สายพิเศษ ดังกล่าว และที่สำคัญการใช้ Raspberry Pi 4 เป็น Monitor Mode แทนการ์ดไร้สายพิเศษ Intel® ได้รับประโยชน์จากการเรียนรู้เชิงลึก (Deep Learning) เนื่องจากสามารถเข้าถึงจำนวนช่องสัญญาณย่อย (Subcarriers) ได้มากกว่าทำให้เรามีข้อมูลสำหรับการเทรนหรือฝึกเครื่อง (Train) Deep Learning Models ได้มากกว่า โดยค่าแอมพลิจูดของ CSI ถูกคอมไพล์รวมกันเป็นเวกเตอร์ขนาด 256×1 และส่งผ่านไปยังแบบจําลองสําหรับเพื่อใช้ในการ Train
Raspberry Pi 4 ถูกกําหนดค่าด้วย Debian 10 (Buster / Linux 4.19.97) พร้อมกับ main branch ของ nexmon csi2 ที่ถูกติดตั้ง Nexmon ได้รับการกําหนดค่าด้วยตัวเลือกตัวกรอง (filter) ต่อไปนี้ ช่อง 36/80, Core 1, NSS mask 1, 30us Delay ตัวกรองที่อยู่ MAC (MAC Address Filter) ถูกตั้งค่าสําหรับ Access Point (AP) การรวบรวมข้อมูลถูกควบคุมจากอุปกรณ์อื่นที่เชื่อมต่อกับ Pi ผ่าน SSH โดยสื่อสารผ่านเครือข่าย 2.4GHz แยกต่างหากเพื่อลดสัญญาณรบกวน ดังแสดงในรูปที่ 2
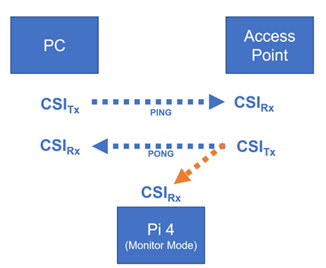

รูปที่ 2 แผนผังแสดงถึง CSI ที่แต่ละอุปกรณ์ที่ใช้ในระบบ
จะเห็นได้ว่าวิธีที่ใช้ใน WP2.1 นี้มีข้อดีที่ไม่ต้องการให้ผู้ใช้พกพาอุปกรณ์หรือ สวมใส่อุปกรณ์เซ็นเซอร์ (Wearable Sensor) ใดๆ และสามารถตรวจจับมนุษย์ได้เคลื่อนที่ผ่านสิ่งกีดขวาง และยังสามารถเข้าถึงได้ทุกที่ไม่ต้องกลัวเรื่องความเป็นส่วนตัวเหมือนอย่างวิธีที่ใช้กล้องอย่างใน WP2.1 และเราไม่ต้องลงทุนอุปกรณ์ โครงสร้างระบบอะไรเพิ่มเติมมากมายเพราะเราสามารถใช้เครือข่าย Wi-Fi ที่มีอยู่แล้ว สามารถตรวจจับการเปลี่ยนท่าทางของคนได้ ผ่านการวัดสัญญานคลื่นวิทยุ Wi-Fi ที่ผ่านสิ่งกีดขวาง และมาผ่านคน มาประมวลสัญญาน แต่ประสิทธิภาพของการสัญญานคลื่นวิทยุ Wi-Fi หากเราใช้เพียงค่าเฉลี่ยความแรงของสัญญานที่รับได้ (Averaged Received Signal Strength (RSS)) สำหรับการตรวจจับท่าทาง (ล้มหรือไม่ล้ม) นี้จะลดลงได้ง่ายจากสภาพแวดล้อม
สัญญาณ Wi-Fi ใช้กันอย่างแพร่หลายไม่เพียงแต่การสื่อสารผ่านเครือข่ายอินเทอร์เน็ต (Internet) แต่ได้เริ่มมีงานวิจัยในการตรวจจับแยกประเภทกิจกรรมของคน โดยนำเอาสัญญาณที่ได้จากการสะท้อนจากคน เนื่องจากท่าทางของคนที่ แตกต่างกัน ทำให้เกิดรูปแบบของสัญญาณสะท้อนที่แตกต่างกัน งานวิจัยที่ใช้ระบบ Wi-Fi เพื่อตรวจจับการหกล้ม เริ่มแรก ใช้เพียงความแรงเฉลี่ยของสัญญาณ (Received Signal Strength (RSS)) ซึ่งวิธีการแบบนี้ให้ประสิทธิภาพไม่ดี เนื่องจาก Multipath Fading ที่เกิดจากการสะท้อน แทรกสอดของคลื่นที่เคลื่อนที่ในอากาศที่หลีกเลี่ยงไม่ได้ ดังนั้นการใช้ข้อมูลสถานะ ช่องสัญญาณ CSI ทำให้สามารถดึงเอาข้อมูลทั้งหมดของสถานะของช่องสัญญาณได้
สภาพแวดล้อมตัวอย่าง (Examples of Environment)
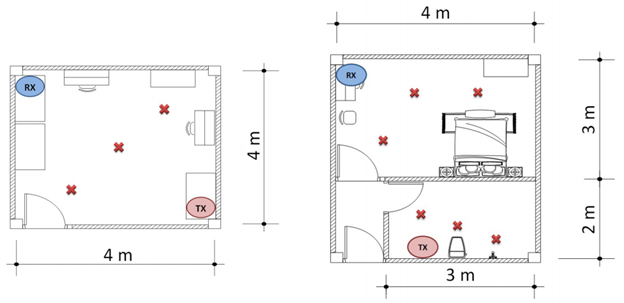
ในสภาพแวดล้อมภายในอาคาร (Indoor Environment) ค่า CSI ประกอบด้วยส่วนประกอบแบบคงที่ (Static Component) และส่วนประกอบแบบไดนามิก (Dynamic Component) ส่วนประกอบคงที่ซึ่งไม่เปลี่ยนแปลงโดยกิจกรรม ของคน ประกอบด้วยส่วนแนวสายตา LoS และส่วนที่สะท้อนหรือไม่มีแนวสายตา NLoS โดยสะท้อนสิ่งกีดขวางเช่น เฟอรนิเจอร์ ผนัง พื้น และเพดาน ส่วนประกอบแบบไดนามิกประกอบด้วย ส่วนสะท้อนที่เกิดจากการเคลื่อนไหวของคนซึ่งเป็นส่วนที่ทำให้สามารถจัดจําแนกประเภทกิจกรรมหรือท่าทาง (ล้มหรือไม่ล้ม) ได้ ตัวอย่างสภาพแวดล้อมที่เราพิจารณา เป็นไปอย่างเช่นห้องเดี่ยวขนาด 4m×4m และแบบมีห้องนอนขนาด 4m×3m และห้องอาบน้ำขนาด 3m×2m ดังแสดงในรูปที่ 3 ซ้าย และขวาตามลำดับ
การปรับเทียบเฟส (Phase Calibration)
แม้ว่าเราสามารถรายงาน Phase ของ CSI ได้ แต่ก็ไม่สามารถใช้ประโยชน์ได้โดยตรง สำหรับ การจดจำท่าทางของคน สัญญาณ Phase ที่วัดได้จะต้องได้รับการปรับเทียบ (Calibration) ก่อนที่จะใช้ในการ Train แบบจำลองการเรียนรู้ของเครื่อง (Machine Learning) เนื่องจากมีสัญญาณรบกวนที่เกิดจากข้อผิดพลาดของอุปกรณ์และความล่าช้าในระหว่างการส่ง Carrier Frequency Offset (CFO) เป็นสาเหตุหลักของข้อผิดพลาดของเฟส ที่เกิดจากตัวแปลงสัญญาณด้านผู้รับ เนื่องจากผู้รับได้รับข้อมูลที่ไม่ถูกต้องเกี่ยวกับความถี่กลางของแต่ละความถี่ Subcarrier โดยใช้ที่ด้านเครื่องส่งสัญญาณ สาเหตุอีกประการหนึ่งคือ Sampling Frequency Offset (SFO) ที่เกิดโดยตัวแปลง อนาล็อกเป็นดิจิตอล (Analog-to-Digital Converter (ADC)) เนื่องจากนาฬิกาที่ไม่ซิงโครไนซ์ (Non-Synchronized Clocks) นอกจากนี้แต่ละ Subcarrier ของเฟสที่วัดได้มีข้อผิดพลาดที่แตกต่างกัน เป็นผลให้สัญญาณเฟสที่วัดได้ ใช้ประโยชน์ ได้ไม่อย่างเต็มที่
การประเมินผลการปฏิบัติงาน (Performance Evaluation)
การประเมินประสิทธิภาพของแบบจำลองการเรียนรู้ที่กล่าวถึงข้างต้น ประกอบไปด้วย ความถูกต้อง (Accuracy) ความแม่นยํา (Precision) การเรียกคืน (Recall) และคะแนน F1 (F1-Score) ซึ่งเป็นเครื่องมือทางสถิติที่ใช้กันอย่างแพร่หลาย ในการประเมิน ประสิทธิภาพของแบบจําลองการเรียนรู้ โดยมีสมการดังต่อไปนี้
| Accuracy = (T P + T N)/(T P + T N + F P + F N), Precision = T P/(T P + F P), Recall = T P/(T P + F N), และ F1 = 2 (Precision)(Recall)/(Precision + Recall), |
โดยที่ TP เป็นบวกจริง (True Positive) TN เป็นลบจริง (True Negative) FP เป็นบวกเท็จ (False Positive) และ FN เป็นลบเท็จ (False Negative)
นอกจากนี้ อีกปัจจัยหนึ่งที่ใช้ในการประเมินประสิทธิภาพของแบบจำลอง Machine Learning คือเวลาในการคํานวณ (Computation Time) และวิเคราะห์ความซับซ้อน (Complexity Analysis) ของการฝึก (Train) แของการฝึก (Train) และการทดสอบ (Test) อัลกอริทึมที่มีความซับซ้อนมากกว่าส่วนใหญ่ใช้เวลานานกว่า นอกจากนี้ในโครงการนี้จะมีส่วนการพัฒนาต่อยอด เช่นเดียวกับของ WP2.1 ในการติดตามผู้ป่วยที่ใช้รถเข็น และขยายผลไปยังบ้าน 10 หลัง เพื่อพัฒนาต่อยอดให้สามารถผลักดันต่อไปสำหรับการใช้งานในเชิงพาณิชย์ รวมไปถึงการปรับไปใช้ระบบประมวลผลที่เป็น ผลิตภัณฑ์ชิ้นเดียวที่ สามารถหาได้ทั่วไปตามท้องตลาด ดังนั้นจะมีขั้นตอนเพิ่มเติมดังต่อไปนี้
- การติดตั้งระบบในบ้าน 10 หลัง เช่นเดียวกับ WP2.1 เพียงแต่เปลี่ยนเทคโนโลยีจากกล้องเป็น Wi-Fi
- มีการทำ Edge hardware packaging เช่นเดียวกับ WP2.1
- การบูรณาการด้วยการวิเคราะห์แบบ Cloud-based
- การแสดงภาพบน Dashboard เช่นเดียวกับ WP2.1
- และท้ายสุดการประเมินผลการทำงานและการใช้งานโดยรวมร่วมกันกับ WP2.1