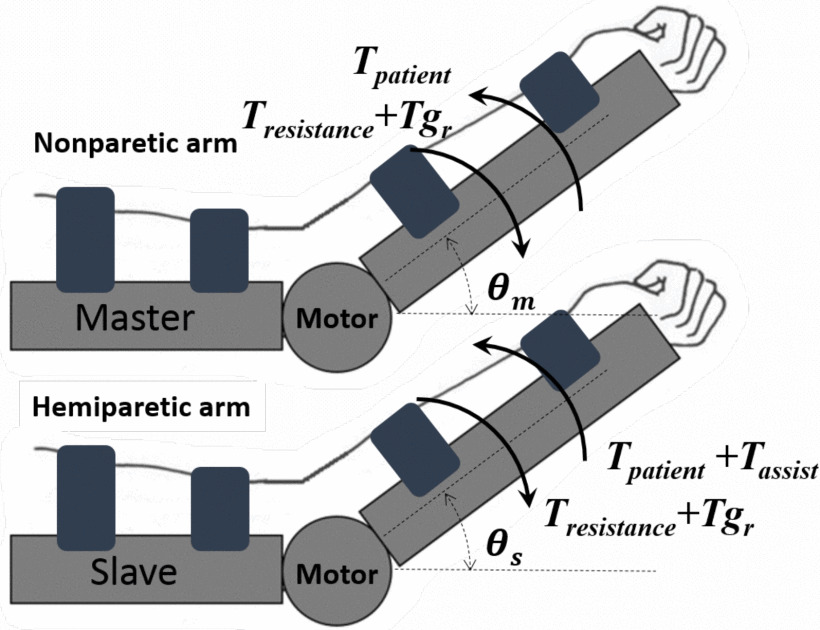
The bi-manual Tele-rehabilitation (BMTR) system consists of two, 1-DoF (Degree of Freedom) robots configured as a master-slave system. The master robot is used by the patient’s non-paretic arm and the slave exoskeleton is used by patient’s hemiparetic arm. Both robots are designed with adjustable length mechanisms to accommodate various arm lengths and weight. The robot is developing to rehabilitate the elbow with a reference to a healthy human torque profile. The parameters are monitored, stored and adjust remotely from the health care medical officer based on the patients progress over the time.
Major Milestone in BMTR
System Modeling & Simulation
Formulation – concept and feasibility analysis
Alpha Level Prototype
Initiation – opportunity and risk analysis
Beta Level Prototype
Design and development- verification and validation to ensure the design output matches the design input
Prototype for clinical Trials
Final validation and post launch assessments
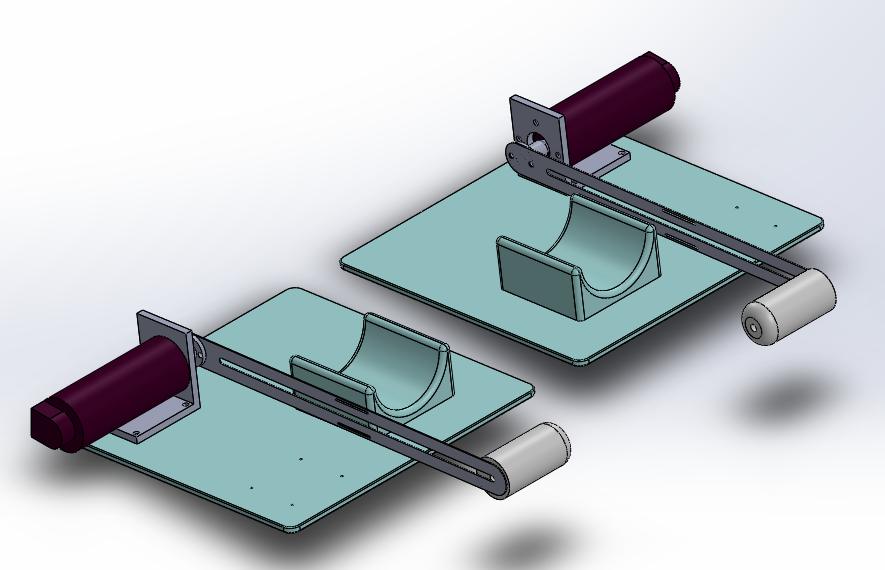
CAD Model of BMTR
BMTR is modeled with CAD software.
Block diagram of BMTR
Model the system mathamatically and represented with a block diagram.
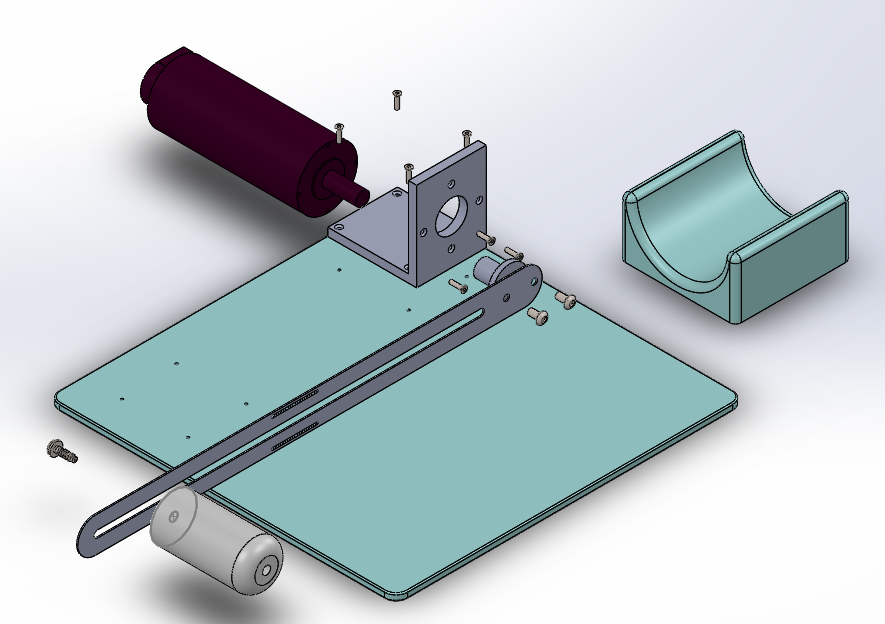
BMTR Exploded View
BMTR assembly is expressed as exploded view.
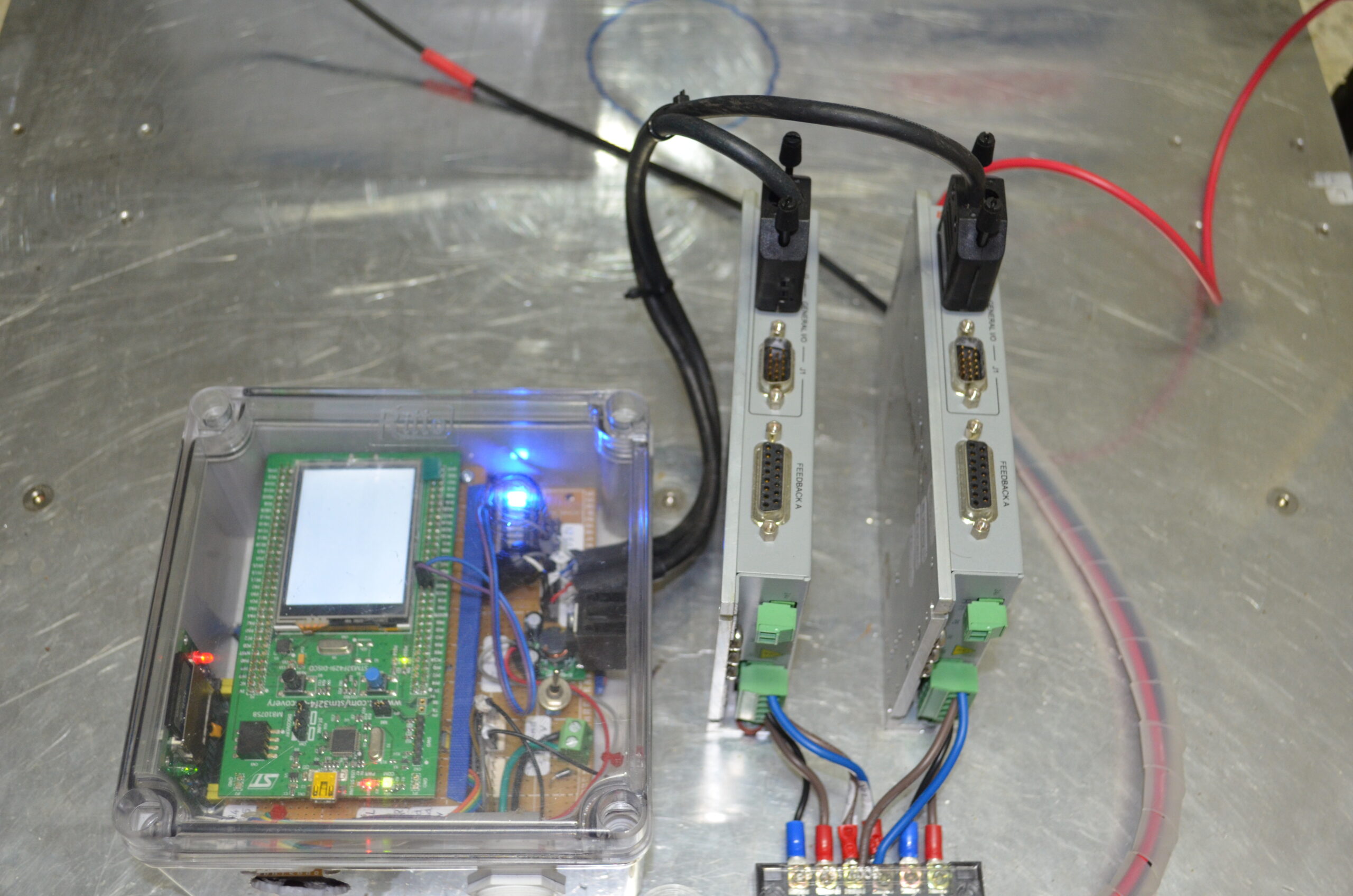
Alpha Level Prototype
Testing the electrical connections on a basic research platform.
© 2022 All Rights Reserved.